An autonomous tennis ball picker is a machine that can collect and gather tennis balls without the need for human intervention. This type of technology has the potential to revolutionize the way we play and practice tennis, making it more efficient and convenient.
One major benefit of an autonomous tennis ball picker is that it can greatly reduce the time and effort required to collect balls during a practice session or match. This is especially important for professional players who may need to hit hundreds of balls in a single session. With an autonomous picker, players can simply hit the balls and let the machine do the rest, allowing them to focus on their game and improve their skills.
In addition to saving time, an autonomous tennis ball picker can also help to reduce the risk of injury for players. Collecting tennis balls can be a physically demanding task, especially if it involves running and bending down repeatedly. By automating this process, players can avoid the strain on their bodies and focus on their game without worrying about the physical demands of ball collection.
There are also environmental benefits to using an autonomous tennis ball picker. Traditional methods of collecting balls often involve manually picking them up and carrying them back to the court, which can be time-consuming and labor-intensive. An autonomous picker, on the other hand, can quickly and efficiently gather balls without the need for human labor, reducing the overall environmental impact of tennis.
Of course, there are also some challenges to be addressed in the development and implementation of autonomous tennis ball pickers. One major challenge is cost, as these machines are likely to be expensive to produce and maintain. Another challenge is the need for advanced sensors and algorithms to enable the machine to accurately locate and collect balls, which will require significant research and development.
Despite these challenges, the potential benefits of an autonomous tennis ball picker are significant, and it is likely that this technology will play a major role in the future of tennis. Whether used by professional players, coaches, or recreational enthusiasts, an autonomous picker can greatly enhance the experience of playing and practicing tennis, making it more efficient, convenient, and enjoyable.
Autonomous Tennis Ball Picker Robot
Decisions of Sponsor are final and binding in all respects. After that, it turns to the right for one second. This solution will score well in the area of cost and portability, but will obviously rank very low in terms of speed. The term robot suggests a machine that has a humanlike appearance. It can make the picker less bulky, and the batteries can last much longer. Therefore, I am convinced that our hard-coded pulse signal functions correctly. Two general types of servo motor circuits were used.
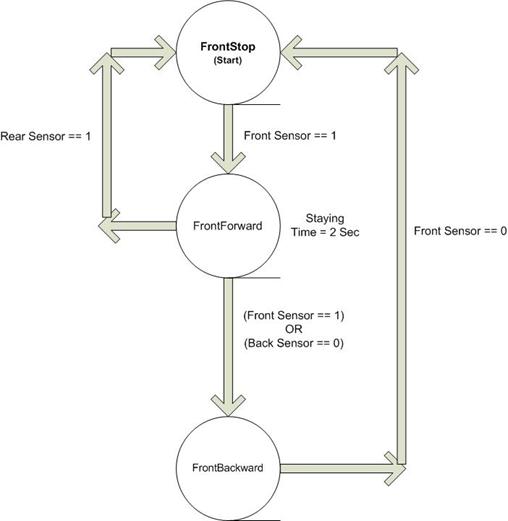
Reference and Acknowledgement We would like to thank Professor Bruce Land for his support in this project. The picking function of the ball picking machine adopts the mechanical arm to move up and down, left and right, and the upper and lower claws are picked by the power provided by the opening and closing motor, and the ground part of the mechanical arm rotates the big gear and the small gear to enable the mechanical arm to do lifting and descending and left and right rotating actions. Showing off your work is easy. Eventually, it changes to the RearForward state to continue sweeping the floor. A tin sheet is used as a ramp just under the rotating blades, and they are positioned a little above the ground, but low enough for balls to be pushed in by the blades. A robot might be solar powered, electrically powered, battery powered.
Void in locations and countries where prohibited by law. Similarly, 2 ms-pulse is input to the motors to drive them in the counter-clockwise direction. The omnidirectional wheel can move in a plurality of different directions, the wheel has the advantages of being capable of rotating on the spot, and the forward and backward movement in different directions can be realized. Another common characteristic is that by its appearance or movements, a robot often conveys a sense that it has intent or agency of its own. Therefore, it is determined that using current technology, a player will spend ~35%of the total time collecting tennis ball, and not training. He can do more practice in less time. Al-Jazari 1136-1206 , a Muslim inventor during the Artuqid dynasty, designed and constructed a number of automated machines, including kitchen appliances, musical automata powered by water, and programmable automata.
The front side ball grabber comprises of three wooden blades positioned equidistantly around a wooden cylinder. In any state, if the number of balls picked up is greater than ten, or if the time exceeds five minutes, it changes to the RearStop state. A rectangular hole is cut at the front of the basket for balls to fly in when they are swept up. The automatic tennis ball picking robot based on the depth vision comprises a base, wherein support columns are fixedly mounted on the front portion and the rear portion of the top surface of the base, stepping motors are mounted on the top surface of the support columns, the stepping motors are in transmission connection with foam rotating plates through output shafts, cameras are mounted on the right side walls of the support columns, a collecting box is mounted on the left side wall of the base, a guide plate is fixedly connected to the right side wall of the base, leakage-proof plates are fixedly connected to the front edge and the rear edge of the top surface of the base, and a control system is mounted inside the base. Reference numbers in the figures: 1. FrontForward : It moves forward to pick up the tennis ball.
Tennibot: The World’s First Robotic Tennis Ball Collector by Tennibot — Kickstarter
An exclusive discount for early adopters of Tennibot. Eventually, it changes to the RearForward state to continue sweeping the floor. Such types of robots are autonomous or remote controlled robots. We also put in signs to warn other classmates away from the sharp tin sheets. The 5-V analog output is converted into a number between 0 and 255. He can do more practice in less time.
The typical applications of industrial robot are wilding painting, assembly, pick and place, packaging, product inspection, testing, all accomplished with high endurance, speed, and precision. The robot vision is a system which enables the robot to have a vision perception function, and the robot vision can acquire one-dimensional, two-dimensional and three-dimensional images of an environment through a vision sensor, analyze and interpret the images through a vision processor and further convert the images into symbols, so that the robot can identify objects and determine the positions and various states of the objects. Less Extreme Early Bird: One Tennibot + Tennibot Station. As a result, our solution is an autonomous ball-picker device that is easy-to-use and cost-effective. There will not be any moving object in the tennis court. His mechanism had a programmable drum machine with pegs cams that bumped into little levers that operated percussion instruments.
The table tennis and tennis ball sorting device 4 comprises a sorting pipeline 26 and a tennis table tennis ball collecting port 24 at the top end of the sorting pipeline 26, wherein a table tennis ball outlet 27 smaller than the diameter of a tennis ball is formed in the pipe wall of the sorting pipeline 26, and a tennis ball outlet 28 is formed at the bottom end of the sorting pipeline 26. The amount of power supply and torque behind the servo motors were analyzed. RearBackward : The picker moves backward. In practice, it is usually an electro-mechanical machine which is guided by computer or electronic programming, and is thus able to do tasks on its own. The tennis court is fairly large, so speed is an important factor in maximizing the efficiency of picking up most, if not all, of the balls on the court. Our final construction is by no means a final product, since it is still a prototype model that can be used for similar devices with this exact purpose. The general idea is that this device will sweep through a tennis court in a smart fashion within a reasonable amount of time.
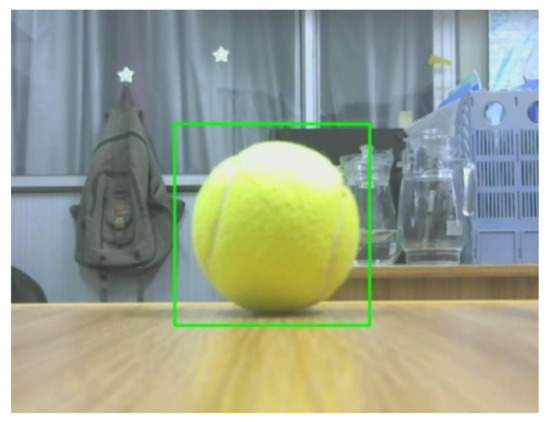
Introduction and Motivation In the tennis and sports equipment market, there are very few advanced electronic devices assisting in the feeding and picking of tennis balls or any other kind of balls. If there is a ball in between, the digital output will be close to 255. The picker implements a rotary blade technology that pushes a tennis ball up half-cylinder structure and over to the basket where it is stored. Artificial intelligence is also diversified gradually, and through the comprehensive application of artificial intelligence and machine vision, control algorithm etc. This wooden cylinder is turned by attaching a servo motor and a wheel connector on each side. Any voltage above the threshold would indicate that a ball has passed through. Google has not performed a legal analysis and makes no representation or warranty as to the accuracy of the list.
The servo motors are opto-isolated to provide protection for the board from inductive spikes released by the motors when they are turned off. The designed automatic ball picking robot has the following general working flow: when the automatic ball picking robot automatically identifies and receives a ball picking command sent by an athlete through a visual identification technology, the falling direction of the table tennis is automatically identified by adopting a sensor. Any attempt by an entrant or any other individual to deliberately damage any website or undermine the legitimate operation of the contest is a violation of criminal and civil laws and should such an attempt be made, the Sponsor reserves the right to seek damages and other remedies from any such person to the fullest extent permitted by law. If the touch sensor does not sense a wall during the one-second period, it means the picker moves out of the corner and is moving parallel to the wall. The second method had a smaller response time by about 0.